
Mentre i sistemi avanzati di assistenza alla guida (ADAS) si stanno diffondendo rapidamente, non vi è un corrispondente incremento nella comprensione del loro funzionamento. Gli utenti sanno davvero come funzionano questi dispositivi? Possono predirne l'attivazione senza rischiare di essere ingannati?
La convenzione di Vienna
- il conducente deve sempre essere in grado di spegnere il sistema e di assumere il controllo del veicolo;
- il sistema deve disattivarsi automaticamente quando riconosce che il conducente sta agendo attivamente;
- il conducente deve essere supportato e non deve essere "sorpreso negativamente".
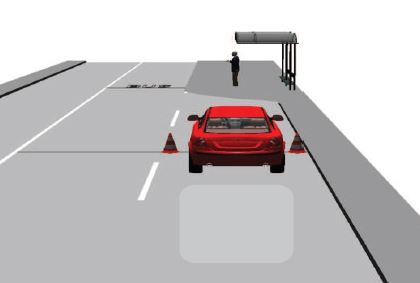
Immaginiamo la situazione mostrata nell'immagine a destra: siamo in città, viaggiamo con calma a 50 km/h, a un certo punto la corsia di restringe per la presenza di una fermata dell'autobus, dove una persona aspetta pazientemente l'arrivo del BUS...
Quando siamo a 30 metri dalla fermata, il dispositivo ADAS della nostra vettura avvista la persona, riconoscendola come pedone. Cosa deve fare a questo punto il sistema?
Il sistema non può sapere se abbiamo visto o meno l'ostacolo e dovrebbe quindi supporre lo scenario peggiore: non abbiamo visto l'ostacolo.
Alla velocità di 50 km/h, considerando un tempo di reazione di un secondo e una frenata decisa, avremmo bisogno proprio di 30 metri per riuscire a frenare.... Per il sistema dovrebbe quindi scattare l'allarme! Ma una frenata in bloccaggio da parte del sistema sarebbe quello che ci aspettiamo? Decisamente no!
Per noi infatti non ci sarebbe alcun bisogno di frenare, perché stavamo proprio per sterzare a sinistra ed evitare l'ostacolo.
Immaginiamo un ulteriore scenario: stiamo superando una fila di macchine, e siamo in procinto di rientrare, nella nostra corsia, quando il sistema riconosce una macchina a 30 metri di distanza che ci sta venendo incontro. Per la nostra velocità e per la distanza tenuta, il sistema dovrebbe frenare subito... Ma se lo facesse l'incidente sarebbe inevitabile!!!
Frenare o non frenare.... Questo è il problema
Gli esempi precedenti mostra un importante parametro decisionale: sterzare o frenare? Molte situazioni potenzialmente pericolose possono essere risolte semplicemente evitando l'ostacolo. E in effetti, in molti casi, quale quelli precedenti, sterzare è una operazione talmente naturale, che l'utente non percepirà nemmeno la potenziale pericolosità della situazione.
Tenendo conto di questo aspetto i sistemi di sicurezza attivi sono progettati con il seguente criterio:
frenare quando ormai non è più possibile sterzare.
Ma come stabilire "quando non è più possibile sterzare?"
Per provare a rispondere alla domanda, nel lavoro di ricerca "Braking – Steering Conflict of ADAS systems" di Walter Niewöhner, sono state fatte delle prove per verificare il limite massimo oltre cui per un conducente non fosse più possibile evitare l'ostacolo sterzando. Le prove sono state condotte facendo guidare vari conducenti verso un ostacolo e chiedendo loro di sterzare il più tardi possibile, per evitare il sinistro.
Dalle prove effettuate sono state ricavate, in funzione della velocità di guida, le varie distanze dall'ostacolo oltre cui non fosse più possibile sterzare.
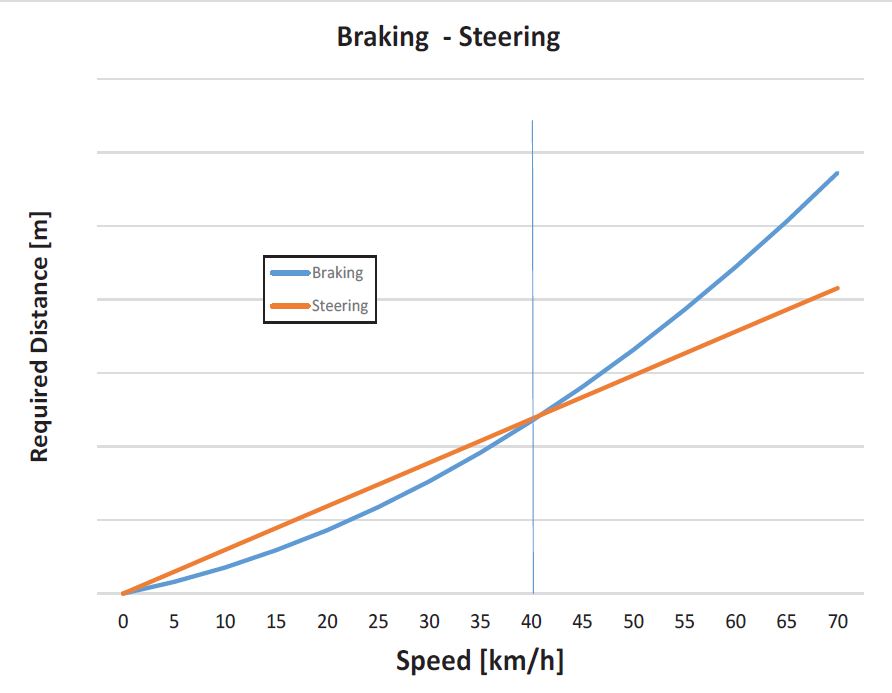
Con semplici formule matematiche, si è poi proceduto a confrontare le minime distanze richieste per evitare un'ostacolo sia sterzando che frenando, in funzione della velocità. I risultati sono riportati nell'immagine, che mostra un dato molto interessante:
- per basse velocità di guida, frenando è più facile evitare ostacoli vicini
- all'aumentare della velocità, frenare richiede una maggior distanza dal veicolo, e questo perché come noto l'energia cinetica aumenta con il quadrato della velocità
- considerando gli spazi di frenata, gli ADAS dovrebbero intervenire a una distanza proporzionalmente maggiore di quella per basse velocità
- considerando la possibilità di sterzare, gli ADAS dovrebbero intervenire ad una distanza proporzionalmente minore.
Ma questo comporta che inevitabilmente, in alcune situazioni, il sistema pur frenando non sarà in grado di evitare l'urto...
Immagini e parte del testo da: "Braking – Steering Conflict of ADAS systems" , Proceeding of EVU Conference 2017, Walter Niewöhner,